ME218B: Smart Product Design Applications
ME218B is the second course in Stanford’s graduate level Mechatronics series. In this course, you learn about user I/O, timer systems, interrupts, signal conditioning, software design for embedded systems, state charts, sensors, actuators, noise, and power supplies.
Labs
The MCU used for all the labs was TI’s Tiva Launchpad, an ARM Cortex M4F evaluation board.
Lab 1 (Individual): Firmware to control stepper motor using wave drive, full step, half step, and micro-stepping.
Lab 2 (Individual): Use PWM peripheral to control speed of a DC motor and measure speed using an encoder.
Lab 3 (Individual): Drive-Break mode and closed loop speed control.
Lab 4 (Team): Mobile robot capable of sensing an IR beacon and receiving commands via SPI.
Team Project
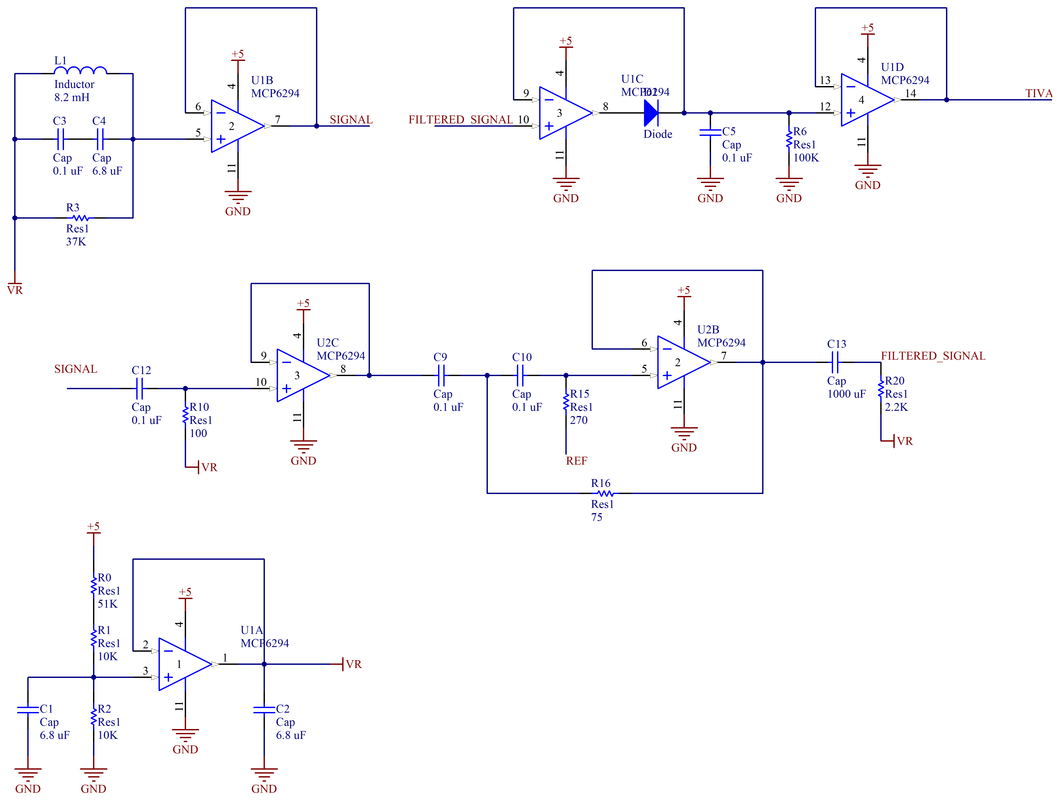
For our team project, our robot needed to sense three things. The first was a 100mA current being driven at 20kHz through a wire. This allowed the robot to drive along the wire. The second was an oscillating magnetic field to determine the location of each station. The third was a long range IR beacon to help the robot align itself with a distant beacon.
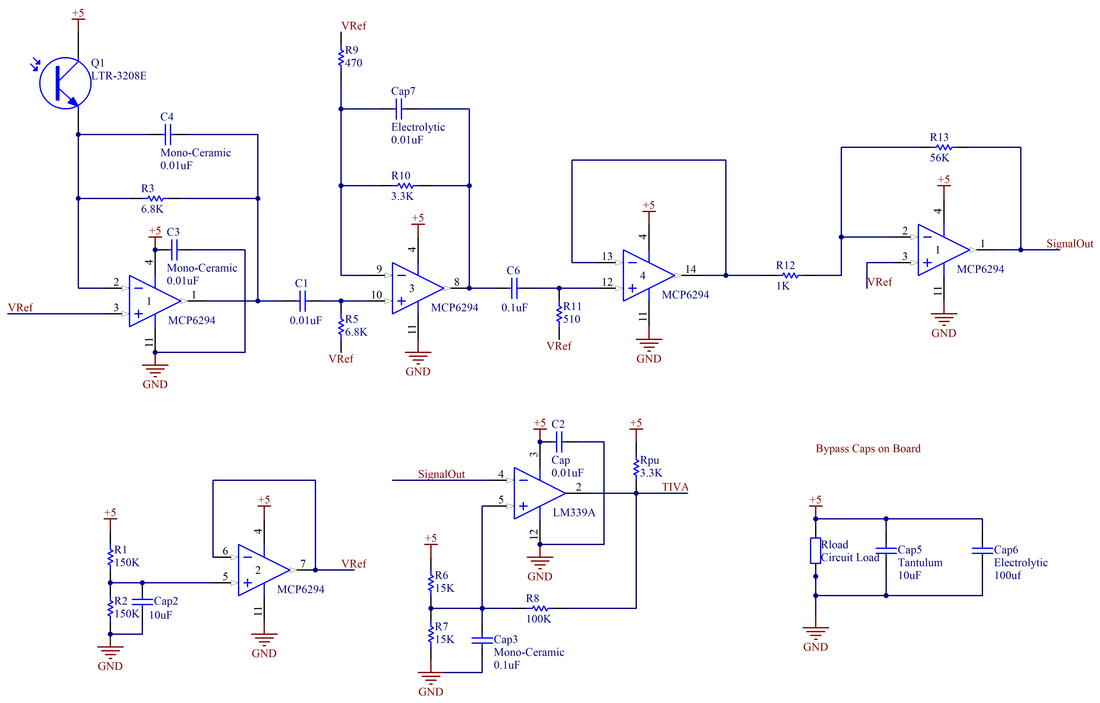
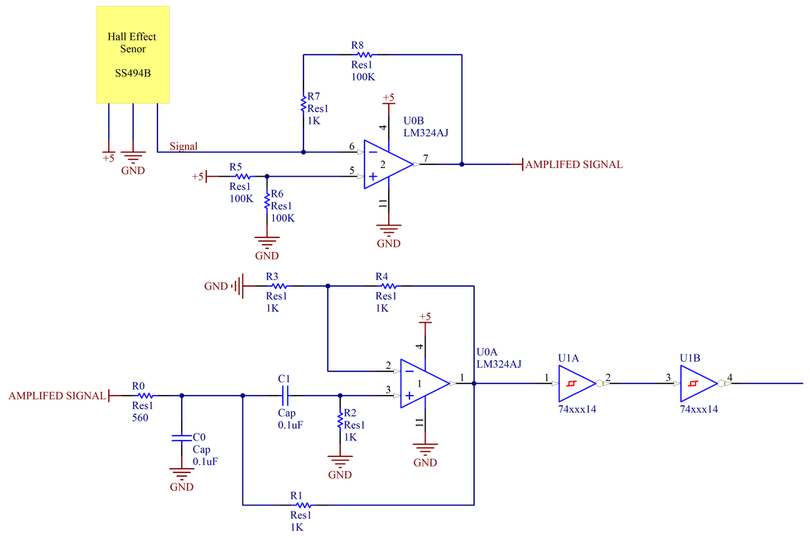
I designed all of the signal conditioning circuits for the three sensors. The circuits I made used a mix of tuned resonance circuits, Butterworth filters, peak detection circuits, Hall effect sensing, and a multi-stage photo transistor amplification.






Wire Sensing Circuit
Hall Effect Circuit
Infrared Light Detecting Circuit